咨询热线:18915258107
咨询热线:18915258107

联 系 人 : 严文鼎
网 址 : www.wxshuowei.com
为何采用机器人点焊的技术特点
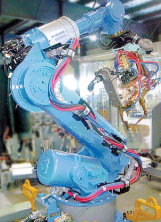
机器人点焊由机器人本体、计算机控制系统、示教盒和点焊焊接系统几部分组成,由于为了适应灵活动作的工作要求,通常电焊机器人选用关节式工业机器人的基本设计,一般具有六个自由度:腰转、大臂转、小臂转、腕转、腕摆及腕捻。
其驱动方式有液压驱动和电气驱动两种。其中电气驱动具有保养维修简便、能耗低、速度高、精度高、安全性好等优点,因此应用较为广泛。点焊机器人按照示教程序规定的动作、顺序和参数进行点焊作业,其过程是完全自动化的,并且具有与外部设备通信的接口,可以通过这一接口接受上一级主控与管理计算机的控制命令进行工作。

技术特点
(1)技术综合性强工业机器人与自动化成套技术,集中并融合了多项学科,涉及多项技术领域,包括工业机器人控制技术、机器人动力学及仿真、机器人构建有限元分析、激光加工技术、模块化程序设计、智能测量、建模加工一体化、工厂自动化以及精细物流等先进制造技术,技术综合性强。
(2)应用领域广泛工业机器人与自动化成套装备是生产过程的关键设备,可用于制造、安装、检测、物流等生产环节,并广泛应用于汽车整车及汽车零部件、工程机械、轨道交通、低压电器、电力、IC装备、军工、烟草、金融、医药、冶金及印刷出版等众多行业,应用领域非常广泛。
(3)技术先进工业机器人集精密化、柔性化、智能化、软件应用开发等先进制造技术于一体,通过对过程实施检测、控制、优化、调度、管理和决策,实现增加产量、提高质量、降低成本、减少资源消耗和环境污染,是工业自动化水平的体现。
(4)技术升级工业机器人与自动化成套装备具备精细制造、精细加工以及柔性生产等技术特点,是继动力机械、计算机之后,出现的全面延伸人的体力和智力的新一代生产工具,是实现生产数字化、自动化、网络化以及智能化的重要手段。

 全国服务热线: 18915258107
全国服务热线: 18915258107
公司地址:无锡市硕威智能焊接装备有限公司
联系方式:18915258107
网址 :www.wxshuowei.com