咨询热线:18915258107
咨询热线:18915258107

联 系 人 : 严文鼎
网 址 : www.wxshuowei.com
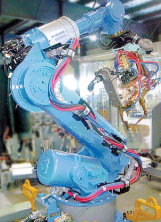
浅析什么是工业机器人点焊技术
工业机器人是高精密的现代机械设备,参数众多,不同的机器人技术参数所对应的应用范围也是不一样的。随着机器人的广泛应用,工业机器人点焊技术这一行业被很多人看好,那么究竟什么是工业机器人点焊技术?下面就来介绍这个问题。
自由度
自由度可以用机器人的轴数进行解释,机器人的轴数越多,自由度就越多,机械结构运动的灵活性就越大,通用性强。但是自由度增多,使得机械臂结构变得复杂,会降低机器人的刚性。当机械臂上自由度多于完成工作所需要的自由度时,多余的自由度就可以为机器人提供一定的避障能力。目前大部分机器人都具有3~6个自由度,可以根据实际工作的复杂程度和障碍进行选择。

驱动方式
驱动方式主要指的是关节执行器的动力源形式,一般有液压驱动、气压驱动、电气驱动,不同的驱动方式有各自的优势和特点,根据自身实际工作的需求进行选择,现在比较常用的是电气驱动的方式。液压驱动的主要优点在于可以以较小的驱动器输出较大的驱动力,缺点是油料容易泄露,污染环境;气压驱动主要优点是具有较好的缓冲作用,可以实现无级变速,缺点是噪声大;电气驱动的优点是驱动效率高,使用方便,而且成本较低。
控制方式
机器人的控制方式也被称为控制轴的方式,主要是用来控制机器人运动轨迹,一般来说,控制方式有两种:一种是伺服控制,另一种是非伺服控制。伺服控制方式有可以细分为连续轨迹控制类和点位控制类。与非伺服控制机器人相比,伺服控制机器人具有较大的记忆储存空间,可以储存较多点位地址,可以使运行过程更加复杂平稳。
相信通过以上的介绍,大家应该已经了解什么是工业机器人点焊技术了。现在是科技社会,如果大家想有很好的发展,提升自身的素质修养是非常有必要的,相信在今后的社会发展中,工业机器人点焊行业会是一个非常好的发展方向。

 全国服务热线: 18915258107
全国服务热线: 18915258107
公司地址:无锡市硕威智能焊接装备有限公司
联系方式:18915258107
网址 :www.wxshuowei.com