咨询热线:18915258107
咨询热线:18915258107

联 系 人 : 严文鼎
网 址 : www.wxshuowei.com
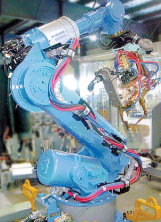
机器人工作站点焊(spot welding robot) 用于点焊自动作业的工业机器人。点焊机于1965年开始使用,是美国Unimation公司推出的Unimate机器人,中国在1987年自行研制成机器人点焊──华宇-Ⅰ型机器人点焊。
机器人工作站点焊由机器人本体、计算机控制系统、示教盒和点焊焊接系统几部分组成,由于为了适应灵活动作的工作要求,通常电焊机器人选用关节式工业机器人的基本设计,一般具有六个自由度:腰转、大臂转、小臂转、腕转、腕摆及腕捻。
机器人工作站点焊其驱动方式有液压驱动和电气驱动两种。其中电气驱动具有保养维修简便、能耗低、速度高、精度高、安全性好等优点,因此应用较为广泛。

机器人工作站点焊按照示教程序规定的动作、顺序和参数进行点焊作业,其过程是完全自动化的,并且具有与外部设备通信的接口,可以通过这一接口接受上一级主控与管理计算机的控制命令进行工作。使用点焊机器人较多领域应当属汽车车身的自动装配车间。
机器人工作站点焊大规模使用的区域将会出如今发达地区。随着产业转移的进行,发达地区的制造业需要提升。基於工人成本不断增长的现实,机器人工作站点焊的应用成为很好替代方式。未来我国机器人工作站点焊的大范围应用将会集中在广东、江苏、上海、北京等地,其机器人点焊拥有量将占全国一半以上。
日益增长的机器人工作站点焊市场以及巨大的市场潜力吸引世界着名机器人生产厂家的目光。当前,我国进口的机器人工作站点焊主要来自日本,但是随着诸如“机器人”类似的具有自有知识产权的企业不断出现,越来越多的机器人点焊将会由中国制造。

 全国服务热线: 18915258107
全国服务热线: 18915258107
公司地址:无锡市硕威智能焊接装备有限公司
联系方式:18915258107
网址 :www.wxshuowei.com