咨询热线:18915258107
咨询热线:18915258107

联 系 人 : 严文鼎
网 址 : www.wxshuowei.com
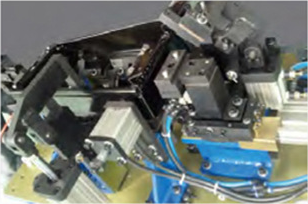
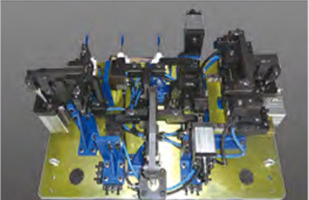
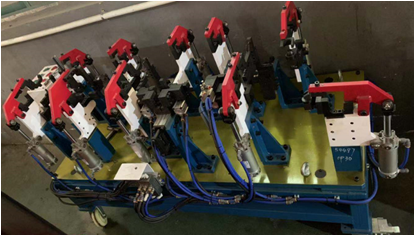
焊接夹具——在机械加工生产过程中,往往会遇到工件的定位问题,这和加工件的加工精度有很大的关系。工件定位问题是比较复杂的过程,并不是一句话两句话就能说的清楚。那么,工件定位问题需求怎么处理呢?
大家都知道,任何一个自在体的空间都有六个自在度,也便是给自在空间三个坐标轴:X、Y、Z表示。沿着这三个坐标轴方向移动的三个自在度和绕过这三坐标轴滚动的三个自在度。
加工工件在装置时,经过机床工作台或焊接夹具上合理分布的六个支承点,与工件的定位基准相触摸,将工件的六个自在度全部约束住,工件便能够获得一个c底确定的位置。这种约束办法称为"六点定则"。工件定位的实质便是约束工件的自在度。

"六点定则"是工件定位的基本法则,在实际生产作业时,需求经过定位元件来确保加工工件的定位,也便是平常所用的装夹装置,这些装夹装置都是具有y定形状的几何体,对工件起支承效果,也便是工件的定位元件。
在加工过程中,有的工件需求c底定位,也便是将六个自在度c底约束。有的工件并不需求c底定位,只需求将几个自在定位就能够完成加工工序,这归于不c底定位。那么究竟应该约束几个自在度和哪几个自在度,应由工件的加工工序的要求来决议。如车削细长轴时,工件装夹在两d尖间,除了绕过其轴线旋转的自在度以外,已约束了所有b要约束的其他五个自在度。
在满足加工工件要求的前提下,能够选用不c底定位,但依据加工要求,应该约束的自在度而没有约束是不允许的,它必然不能确保加工工序完成,一起也不能确保加工的要求。
无锡市硕威智能焊接装备有限公司是一家专业设计和研发焊接设备及机器人系统集成的制造和销售商。主要经营和销售:riben安川机器人、发那科机器人、ABB、KUKA。如:机器人螺柱焊接、机器人激光焊接、机器人激光切割、机器人搬运 、码垛、机器人铝焊接 弧焊接和点焊等非标自动化专机及系统集成等, 电阻焊机系列有,中频交直流电阻焊和duo功能扩散焊接设备。作为经营和销售焊接机器人专机及系统集成的专业厂商和制造商,拥有先进的机器人仿真模拟软件系统和技术团队,为众多厂商提供现场布局方案和生产节拍优化,节省生产线的空间和生产节拍效率的提高。

 全国服务热线: 18915258107
全国服务热线: 18915258107
公司地址:无锡市硕威智能焊接装备有限公司
联系方式:18915258107
网址 :www.wxshuowei.com