咨询热线:18915258107
咨询热线:18915258107

联 系 人 : 严文鼎
网 址 : www.wxshuowei.com
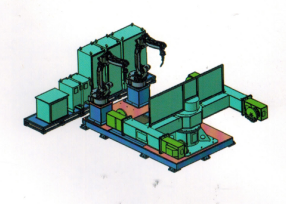
机器人工作站分享焊接机器人的几种分类应用
焊接机器人的几类归类运用
机器人工作站分享一、直角坐标系智能机器人
三个棱柱体骨节,其中心线按直角坐标系配备,动力学实体模型简易形象化,必须很大的实际操作室内空间,多制成大中型龙们式或架构式智能机器人。
机器人工作站分享二、圆柱体座标智能机器人
胳膊Z少有一个旋转骨节和一个棱柱体骨节,其中心线按圆柱体座标配备,动力学实体模型简易形象化,便于进到张口一部分。
机器人工作站分享三、极坐标系智能机器人
胳膊有两个旋转骨节和一个棱柱体骨节,其中心线按极坐标系配备,动力学实体模型较繁杂,占有室内空间较小,实际操作范畴大且灵便。
机器人工作站分享四、骨节智能机器人
三个旋转骨节,具备的是实际操作协调能力和交通流,工作中室内空间大,动力学实体模型较繁杂,视觉效果上不形象化,构造弯曲刚度较弱。
机器人工作站分享五、SCARA智能机器人
它有三个旋转关节和一个挪动骨节,为水准骨节型构造,顺滑性好,可以完成高精密和高速运行健身运动。


 全国服务热线: 18915258107
全国服务热线: 18915258107
公司地址:无锡市硕威智能焊接装备有限公司
联系方式:18915258107
网址 :www.wxshuowei.com