咨询热线:18915258107
咨询热线:18915258107

联 系 人 : 严文鼎
网 址 : www.wxshuowei.com
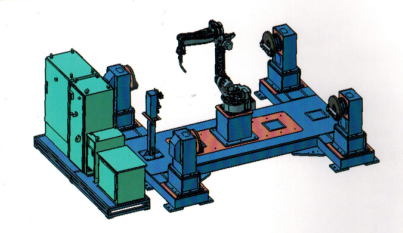
点焊机器人由机器人本体、计算机控制系统、示教盒和点焊焊接系统几部分组成,由于为了适应灵活动作的工作要求,通常电焊机器人选用关节式工业机器人的基本设计,一般具有六个自由度:腰转、大臂转、小臂转、腕转、腕摆及腕捻。其驱动方式有液压驱动和电气驱动两种。其中电气驱动具有保养维修简便、能耗低、速度高、精度高、安全性好等优点,因此应用较为广泛。点焊机器人按照示教程序规定的动作、顺序
和参数进行点焊作业,其过程是完全自动化的,并且具有与外部设备通信的接口,可以通过这一接口接受上一级主控与管理计算机的控制命令进行工作。


 全国服务热线: 18915258107
全国服务热线: 18915258107
公司地址:无锡市硕威智能焊接装备有限公司
联系方式:18915258107
网址 :www.wxshuowei.com