-
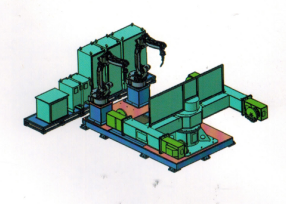
机器人变位机协同控制系统在不同行业中有广泛应用,以下是一些行业的具体情况:汽车行业:焊接作业:在汽车车身焊接中,机器人变位机协同控制系统可实现对车身各个部位的精确焊接。多台机器人与变位机配合,能够在不同的角度和位置对车身进行焊接,提高焊接质
发布时间:2024-11-01 点击次数:30
-
机器人变位机协同控制系统的精度和速度会受到以下多种因素的影响:一、机械结构因素机械精度:机器人和变位机的制造精度,包括各关节的加工精度、装配精度等。如果精度不高,会导致运动误差累积,影响系统的最终精度。例如,关节处的间隙过大可能会使机器人在
发布时间:2024-10-25 点击次数:33
-
机器人变位机协同控制系统的发展趋势如下:智能化与自主化:自主决策与路径规划:系统将具备更强的自主决策能力,能够根据生产任务、工件特征和环境变化,自动规划机器人和变位机的运动路径和协同动作。例如,在面对复杂形状的工件焊接任务时,系统可以自动分
发布时间:2024-10-18 点击次数:36
-
机器人变位机协同控制系统的性能对生产效率有着显著的影响,具体表现如下:一、精度提升带来的效率提高减少废品率:高精度的协同控制系统能够确保机器人和变位机的动作准确无误,从而大大降低生产过程中的废品率。例如,在精密焊接应用中,精确的位置控制可以
发布时间:2024-10-11 点击次数:30
-
评估机器人变位机协同控制系统的性能可以从以下几个方面进行:一、精度方面重复定位精度:多次将变位机和机器人移动到同一位置,测量其位置偏差。重复定位精度反映了系统在重复执行相同动作时的准确性和稳定性。绝对定位精度:测量系统将变位机和机器人准确移
发布时间:2024-10-04 点击次数:37
-
为保障机器人变位机协同控制系统的稳定性,可以从以下几个方面着手:一、硬件优化选用高品质部件:选择精度高、稳定性好的电机、减速器、传感器等关键部件。例如,采用高精度的伺服电机,其具有良好的速度和位置控制精度,能够确保变位机和机器人的运动准确可
发布时间:2024-09-27 点击次数:30
-
机器人变位机协同控制系统的稳定性受到多种因素的影响,总体而言可以从以下几个方面来分析其稳定性:一、硬件方面机械结构稳定性:变位机和机器人的机械结构设计是否合理、坚固,直接影响系统的稳定性。高质量的机械部件、精密的加工和装配,能够减少振动和误
发布时间:2024-09-20 点击次数:22
-
机器人变位机协同控制系统的稳定性受到多种因素的影响,总体而言可以从以下几个方面来分析其稳定性:一、硬件方面机械结构稳定性:变位机和机器人的机械结构设计是否合理、坚固,直接影响系统的稳定性。高质量的机械部件、精密的加工和装配,能够减少振动和误
发布时间:2024-09-13 点击次数:52
-
机器人变位机的协同控制可以应用在以下多个领域:一、汽车制造领域车身焊接:在汽车车身的焊接过程中,机器人变位机协同控制可以将车身部件精确地调整到最佳焊接位置,使机器人能够从不同角度进行高质量的焊接。例如,对于复杂的车身结构,变位机可以将工件旋
发布时间:2024-09-06 点击次数:27
-
机器人变位机的协同控制具有以下诸多优势:一、提高生产效率同步运动:机器人和变位机能够实现同步运动,减少等待时间。在加工过程中,当机器人完成一部分操作后,变位机可以立即将工件调整到下一个合适的位置,使机器人无需等待变位机完成动作后再继续工作,
发布时间:2024-08-30 点击次数:35
-
机器人变位机的控制方式主要有以下几种:一、手动控制操作人员通过控制面板上的按钮、旋钮等手动操作装置来控制变位机的运动。这种控制方式适用于调试、维修或简单的操作场景。手动控制的优点是操作直观、简单,可以直接观察到变位机的运动状态。但缺点是精度
发布时间:2024-08-23 点击次数:14
-
在选择合适的机器人变位机时,需综合考虑负载能力、精度和运动范围等因素,以下是具体的方法:一、负载能力确定工件重量和尺寸:首先要明确待加工工件的最大重量和尺寸。测量工件的实际重量,并考虑可能的附加负载,如夹具、工具等。同时,了解工件的外形尺寸
发布时间:2024-08-16 点击次数:33
-
机器人变位机的技术参数对其性能有着至关重要的影响,主要体现在以下几个方面:一、负载能力负载能力决定了变位机能够承载的工件重量。如果负载能力不足,在实际应用中可能无法承载较大尺寸或较重的工件,导致设备无法正常工作。而过高的负载能力则可能会造成
发布时间:2024-08-09 点击次数:12
-
焊接夹具的工作原理主要是通过定位和夹紧来固定焊件,确保焊接位置的准确性和稳定性。具体来说,焊接夹具的工作原理包括以下几个步骤:定位:使用定位元件将焊件在夹具中定位,确保焊件的位置符合焊接要求。定位元件可以是夹具上的定位销、定位面等,也可以是
发布时间:2024-07-29 点击次数:83
-
要保证变位机的精度和稳定性,可以采取以下措施:选用优质材料:使用高强度、高精度的材料,确保结构坚固。精密加工:通过先进的加工工艺,保证零部件的尺寸精度和形位公差。合理设计:采用科学的结构设计,提高变位机的刚性和稳定性。严格检测:在生产过程中
发布时间:2024-06-27 点击次数:44
-
变位机在以下行业应用比较广泛:汽车制造:用于汽车零部件的焊接、装配等工序。机械制造:如机床加工、结构件焊接等。金属结构加工:如钢梁、钢柱的焊接等。航空航天:用于飞机零部件的加工和装配。能源行业:如核电、火电设备的制造等。船舶制造:在船体焊接
发布时间:2024-06-20 点击次数:36
-
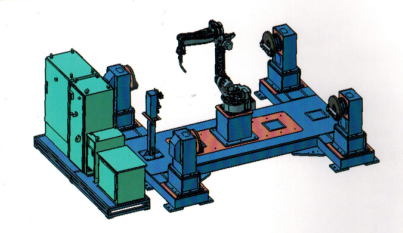
机器人变位机的工作原理主要是通过驱动装置带动工作台或夹具进行旋转、倾斜等动作。它通常采用电机、减速机等部件来实现精确的运动控制,使工件在不同的位置和姿态下与机器人配合,完成各种复杂的加工任务。就像一个灵活的舞台,让工件在上面展现出不同的姿态
发布时间:2024-06-13 点击次数:43
-
以下是一些预防电气设备静电危害的方法:接地良好:确保电气设备接地可靠,及时导走静电。湿度控制:保持环境适当湿度,减少静电产生和积累。使用防静电材料:在设备和相关设施中采用防静电材料。人员防静电措施:操作人员穿戴防静电服装、手套等。定期检测:
发布时间:2024-06-06 点击次数:25
-
以下是一些判断电气设备是否处于安全工作状态的方法:外观检查:观察设备外观是否有破损、变形、烧焦等异常现象。绝缘检测:使用专业仪器测量设备的绝缘电阻,确保绝缘性能良好。温度检测:检查设备运行时的温度是否正常,有无异常发热情况。电气参数测量:测
发布时间:2024-05-30 点击次数:34
-
以下是一些确保机器人变位机电气安全的方法:定期检查电气线路:查看线路是否有破损、老化等情况,及时更换有问题的线路。安装漏电保护器:能在漏电时及时切断电源,防止触电事故。保持电气设备清洁干燥:避免灰尘、水汽等影响电气性能。专业人员维护:由专业
发布时间:2024-05-23 点击次数:27
-
使用机器人变位机时需要注意以下安全问题:人员防护:确保操作人员穿戴好防护装备,避免被机器伤害。设备固定:保证变位机安装牢固,防止在运行过程中出现松动或倾倒。电气安全:定期检查电气线路,防止漏电等情况发生。运行监测:密切关注变位机的运行状态,
发布时间:2024-05-16 点击次数:31
-
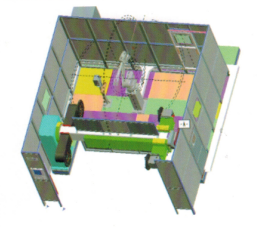
机器人变位机是一种与机器人配合使用的设备,它主要有以下作用:扩展机器人工作空间:使机器人能够到达更多的位置,完成更复杂的任务。提高焊接精度:通过精确的位置调整,保证焊接质量。提升生产效率:实现连续、高效的生产过程。机器人变位机有多种类型,如
发布时间:2024-05-09 点击次数:34
-
以下是一些焊接夹具的制作方法:选材:根据需要选择合适的材料,如钢材等。设计图纸:根据焊件的形状和尺寸设计夹具的结构。切割和加工:按照设计图纸进行切割和加工,确保尺寸精度。组装:将各个部件组装起来,使用紧固件固定。调试和改进:制作完成后进行调
发布时间:2024-05-02 点击次数:37
-
以下是一些焊接夹具的使用方法:准备工作:清洁焊件和夹具,确保无杂质影响。正确安装:将焊件放置在夹具中,调整位置使其固定牢固。调整位置:根据焊接需求,微调焊件位置。焊接过程:在夹具的固定下进行焊接操作。拆卸夹具:焊接完成后,小心拆卸夹具,避免
发布时间:2024-04-25 点击次数:39
-
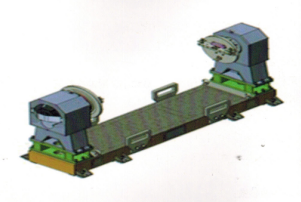
焊接变位机的构成与应用焊接变位机的构成与应用主要是通过工作台的升降、回转、翻转等运动使工件处于较佳焊接位置,有侧翻式、头尾式、升降式及双回转等多种结构形式。可与焊接操作架等配套组成自动焊
发布时间:2021-02-22 点击次数:68
-
在选购机器人变位机过程中需要注意机器人变位机和焊接操作机都是焊接辅助设备中非常重要的辅助设备。机器人变位机主要是能够提升焊件的焊接精度,使得焊接的位置以及焊接速度都达到较好的效果。那么商
发布时间:2020-11-27 点击次数:74
-
现阶段工业机器人系统集成有如下特点:1)不能批量复制系统集成项目是非标准化的,每个项目都不一样,不能100%复制,因此比较难上规模。能上规
发布时间:2020-07-03 点击次数:125
-
变位机作为机器人焊接生产线和柔性焊接加工单元的重要组成部分,其作用是将被焊工件旋转(平移)到达的焊接位置。在焊接作业之前和焊接过程中,变位机通过夹具来装卡和定位被焊工件,对工件的不同要求决定了变位机的负载能力及其运动方式。变位机一般按照驱动
发布时间:2019-03-12 点击次数:103

 咨询热线:18915258107
咨询热线:18915258107


 全国服务热线: 18915258107
全国服务热线: 18915258107